理论计算极限
优化之前需明确,该次优化可获得多大收益。此处介绍两个定律,以在优化过程中进行简单理论评估。
- 阿姆达尔定律——强扩展性
强扩展是指在规模固定的情况下,通过提高多处理器的数量来减少代码执行的时间。
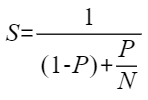
阿姆达尔定律(Amdahl's Law)解释了提升一个系统的一个部分的性能对整个系统有多大影响。公式中的参数含义如下。
- S:加速比
- P:可以并行化代码分数
- N:并行部分可以得到的多处理器的数量
通过公式可以得出:P越大,S即优化空间越大。在P很小的情况下,不论增加多少计算资源,整个优化收益都较小。
- 古斯塔夫森定律——弱扩展性
弱扩展是指问题的规模可能会随着资源的增加而增加。
可以用古斯塔夫森定律(Gustafson's law)来理论分析,公式参数同阿姆达尔定律。
通过公式可以得出:随着N的增加,整个问题规模也越来越大。在优化时首先要分析问题归属场景,再根据每类场景对应公式做简单推测。

在优化过程当中,每一项指标都受到硬件的限制,以下介绍每个指标的理论峰值天花板。
- A100卡单精度FLOPS极限=(2倍FP64,1/4 FP16):
1410MHz内核时钟 * 1 GPU * (108多处理器 * 64 浮点计算/多处理器) * 2 ops/cycle = 19.5TFLOPS
- A100内存带宽极限:
一般来说,程序的内存带宽利用率达到40%~60%是一般水平,达到60%~75%则利用率较高,到75%以上则非常高,绝大部分GPU代码都受限于内存利用率。这里要提一下利特尔法则(Little's Law):
L = λW
其中:
- L为系统中平均物体的数量
- W为物体在系统中的平均等待时间(逗留时间)
- λ为物体进入系统的速率
物体进入系统的速率是λ个每秒,整个系统一共保留了W秒的物体,因此整个系统里有L个物体。
系统中平均物体的数量,即一个物体在系统中逗留的那段时间里总共又进来了多少物体,等于物体进入系统的速率 * 物体的平均逗留时间。
对应到GPU代码优化上,传送的有用字节数 = 单位时间传送的字节数 * 带宽,那么要么降低每个内存事务的平均延迟时间,要么增大带宽。
不同的存储类型的访问时间如表1所示。
存储类型 |
寄存器 |
共享内存 |
纹理内存 |
常量内存 |
全局内存 |
|---|---|---|---|---|---|
带宽(B/s) |
~8T |
~1.5T |
~200M |
~200M |
~200M |
延迟(clock) |
1 |
1~32 |
400~600 |
400~600 |
400~600 |
上述性能采用A100显卡数据,其他显卡性能请参考:https://sysrqmts.com/zh/gpus/compare/nvidia-a10-pcie-vs-nvidia-a100-sxm4-40-gb